Navigation
- index
- next |
- previous |

- Home »
- The Benchmarks »
- NIST
 NIST¶
NIST¶| Fopt Known | Xopt Known | Difficulty |
|---|---|---|
| Yes | Yes | Medium |
This benchamrk test suite is not exactly the realm of Global Optimization solvers, but the NIST StRD dataset can be used to generate a single objective function as “sum of squares”. I have used the NIST dataset as implemented in lmfit.
The NIST datasets are ordered by level of difficulty (lower, average, and higher). This ordering is meant to provide rough guidance for the user. Producing correct results on all datasets of higher difficulty does not imply that the solver will correctly solve all datasets of average or even lower difficulty. Similarly, producing correct results for all datasets in this collection does not imply that your optimization algorithm will do the same for your own particular dataset. It will, however, provide some degree of assurance, in the sense that a specific solver provides correct results for datasets known to yield incorrect results for some software.
The robustness and reliability of nonlinear least squares solvers depends on the algorithm used and how it is implemented, as well as on the characteristics of the actual problem being solved. Nonlinear least squares solvers are particularly sensitive to the starting values provided for a given problem. For this reason, NIST provides three sets of starting values for each problem: the first is relatively far from the final solution; the second relatively close; and the third is the actual certified solution.
In this specific instance, for solvers that accepts an initial starting point  , I have provided them with the first
one specified by NIST. For algorithms which do not accept a starting point, tough luck: life isn’t fair.
, I have provided them with the first
one specified by NIST. For algorithms which do not accept a starting point, tough luck: life isn’t fair.
Note
NIST does not provide bounds on the parameters for its models, but by examining the two starting points and the certified solutions provided by NIST it is possible to build a set of very loose bounds for the optimization variables.
 Methodology¶
Methodology¶There isn’t much to describe in terms of methodology, as the equations, data, starting points, certified solutions and level of difficulty have been clearly spelled out by NIST. Table 11.1 below gives an overview of the various problems in terms of dimensionality, the equations and level of difficulty.
| Name | Dimension | Difficulty | Function |
|---|---|---|---|
| Bennett5 | 3 | Higher |  |
| BoxBOD | 2 | Higher |  |
| Chwirut1 | 3 | Lower |  |
| Chwirut2 | 3 | Lower | |
| DanWood | 2 | Lower |  |
| ENSO | 9 | Average |  |
| Eckerle4 | 3 | Higher |  |
| Gauss1 | 8 | Lower |  |
| Gauss2 | 8 | Lower | |
| Gauss3 | 8 | Average | |
| Hahn1 | 7 | Average |  |
| Kirby2 | 5 | Average |  |
| Lanczos1 | 6 | Average |  |
| Lanczos2 | 6 | Average | |
| Lanczos3 | 6 | Lower | |
| MGH09 | 4 | Higher |  |
| MGH10 | 3 | Higher |  |
| MGH17 | 5 | Average |  |
| Misra1a | 2 | Lower | |
| Misra1b | 2 | Lower |  |
| Misra1c | 2 | Average |  |
| Misra1d | 2 | Average |  |
| Nelson | 3 | Average |  |
| Rat42 | 3 | Higher |  |
| Rat43 | 4 | Higher |  |
| Roszman1 | 4 | Average |  |
| Thurber | 7 | Higher | |
 General Solvers Performances¶
General Solvers Performances¶Table 11.2 below shows the overall success of all Global Optimization algorithms, considering every benchmark function,
for a maximum allowable budget of  .
.
The NIST benchmark suite is a medium-difficulty test suite: the best solver for is MCS, with a success
rate of 63.0%, followed by BiteOpt at a significant distance.
Note
The reported number of functions evaluations refers to successful optimizations only.
| Optimization Method | Overall Success (%) | Functions Evaluations |
|---|---|---|
| AMPGO | 33.33% | 383 |
| BasinHopping | 11.11% | 230 |
| BiteOpt | 48.15% | 1,091 |
| CMA-ES | 14.81% | 940 |
| CRS2 | 25.93% | 1,314 |
| DE | 7.41% | 1,320 |
| DIRECT | 3.70% | 515 |
| DualAnnealing | 11.11% | 308 |
| LeapFrog | 18.52% | 681 |
| MCS | 62.96% | 302 |
| PSWARM | 0.00% | 0 |
| SCE | 29.63% | 980 |
| SHGO | 7.41% | 202 |
These results are also depicted in Figure 11.1, which shows that MCS is the better-performing optimization algorithm, followed by BiteOpt and AMPGO. Note that PSWARM has a 0% success rate i this case.
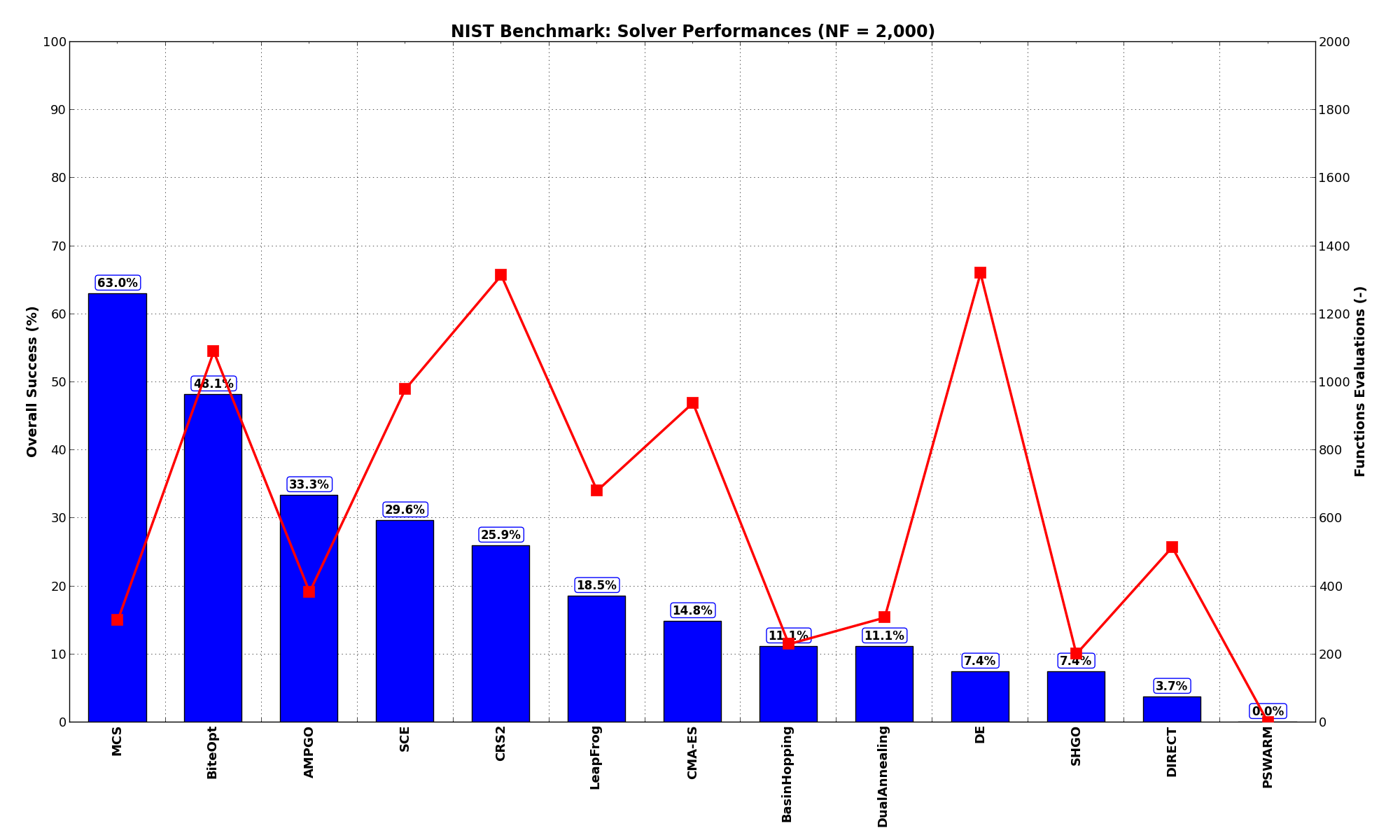
Figure 11.1: Optimization algorithms performances on the NIST test suite at
Pushing the available budget to a very generous  , the results show MCS still keeping the lead,
solving abot 74% of the problems, with BiteOpt and CRS2 tied at second place. The results are also shown visually in Figure 11.2.
, the results show MCS still keeping the lead,
solving abot 74% of the problems, with BiteOpt and CRS2 tied at second place. The results are also shown visually in Figure 11.2.
| Optimization Method | Overall Success (%) | Functions Evaluations |
|---|---|---|
| AMPGO | 51.85% | 1,725 |
| BasinHopping | 14.81% | 1,405 |
| BiteOpt | 70.37% | 2,136 |
| CMA-ES | 44.44% | 4,392 |
| CRS2 | 70.37% | 4,242 |
| DE | 40.74% | 3,723 |
| DIRECT | 3.70% | 515 |
| DualAnnealing | 14.81% | 937 |
| LeapFrog | 22.22% | 1,667 |
| MCS | 74.07% | 630 |
| PSWARM | 7.41% | 3,292 |
| SCE | 37.04% | 1,423 |
| SHGO | 7.41% | 202 |
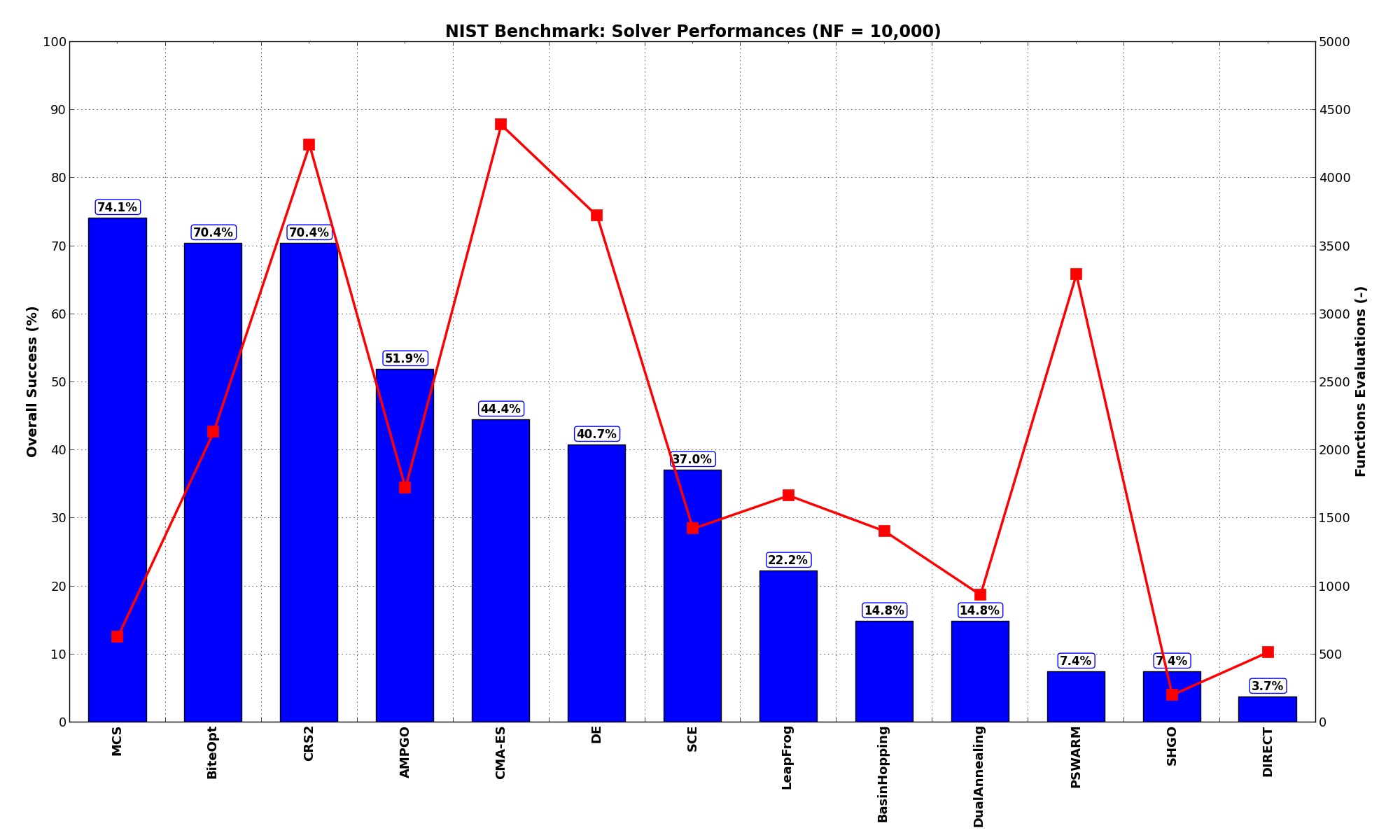
Figure 11.2: Optimization algorithms performances on the NIST test suite at
In this specific test suite, it’s also interesting to show the actual outcome of the fit for some selected objective functions, and this is presented in Figure 11.3. a few remarks on these plots:
 label in the text inset).
label in the text inset). are also displayed in the text inset.
are also displayed in the text inset.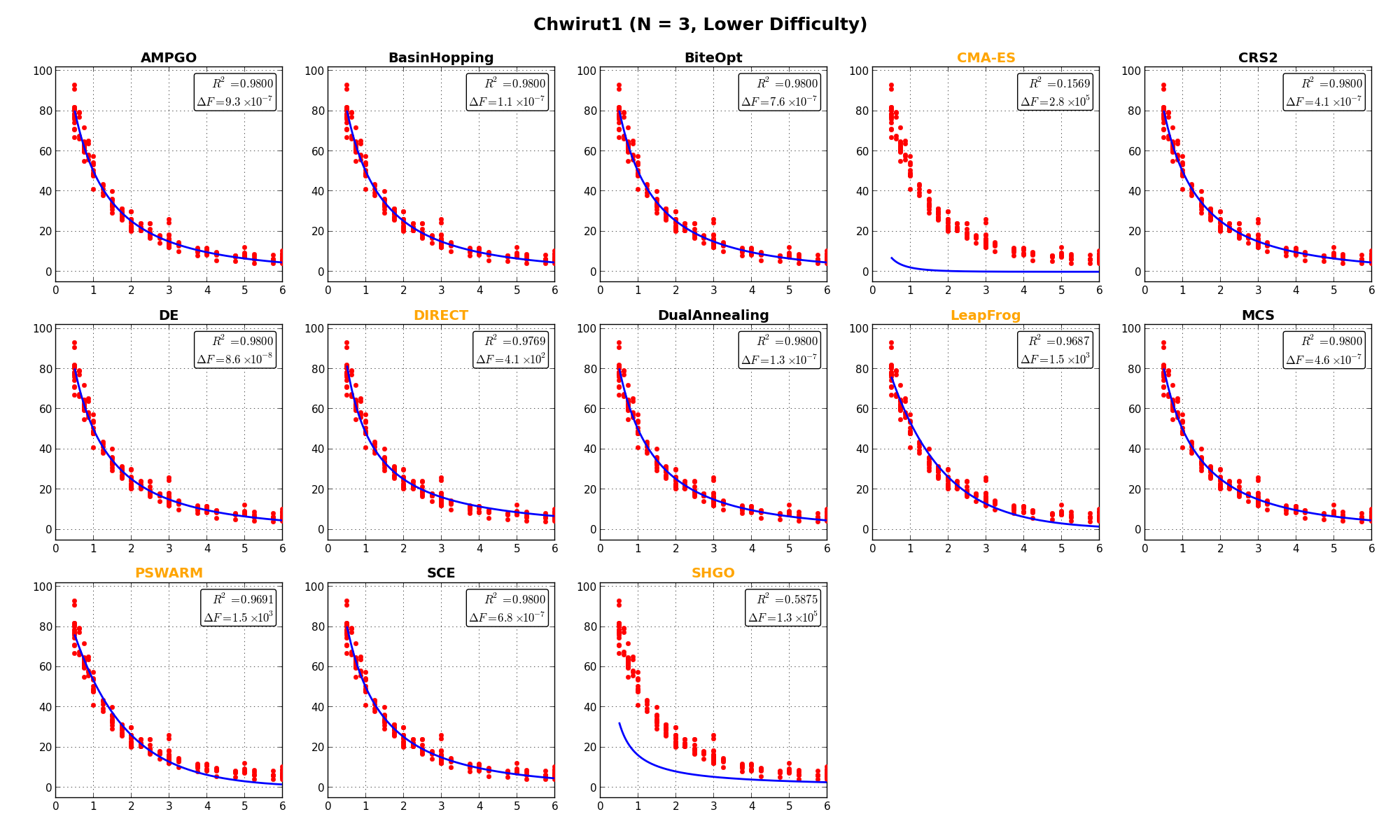
NIST Function Chwirut1 |
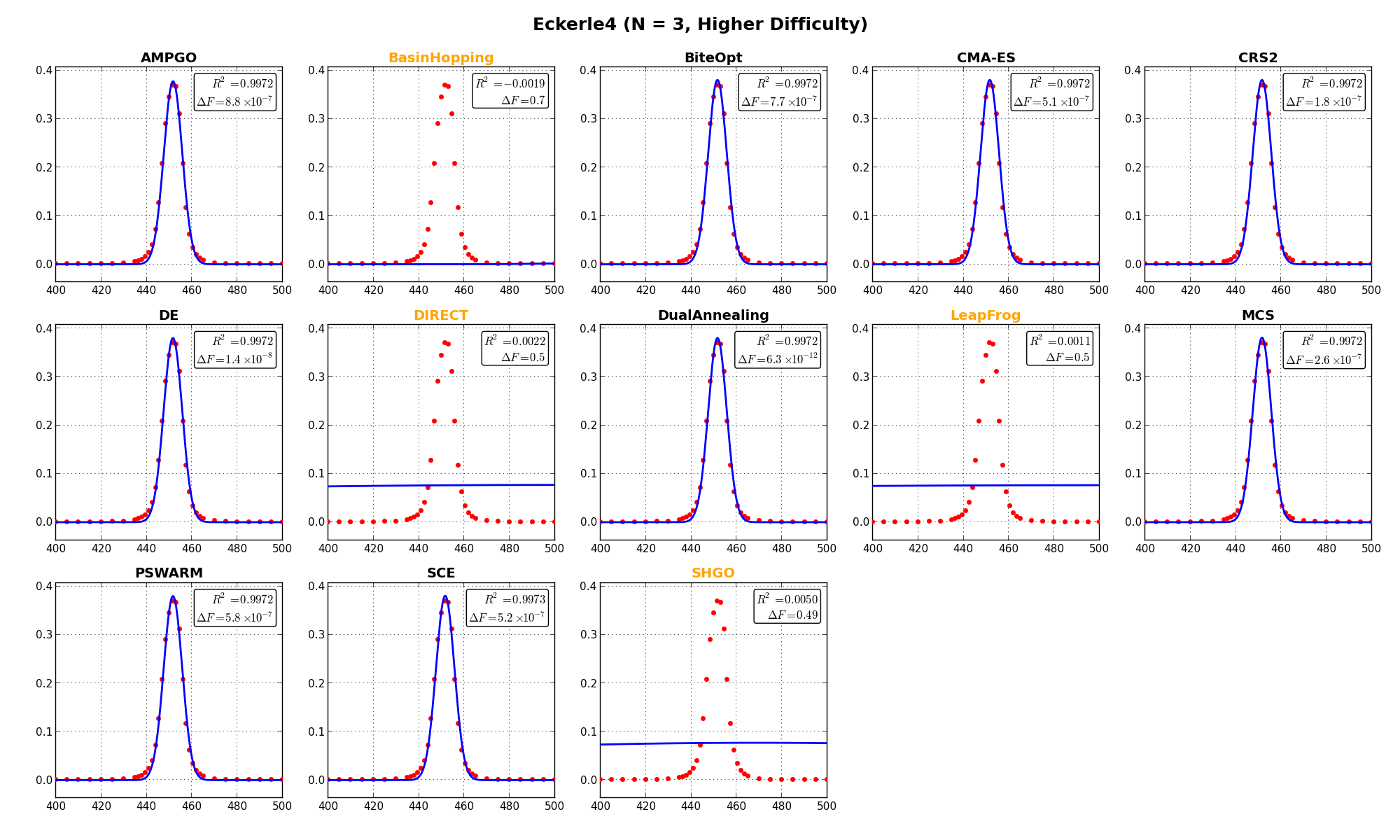
NIST Function Eckerle4 |
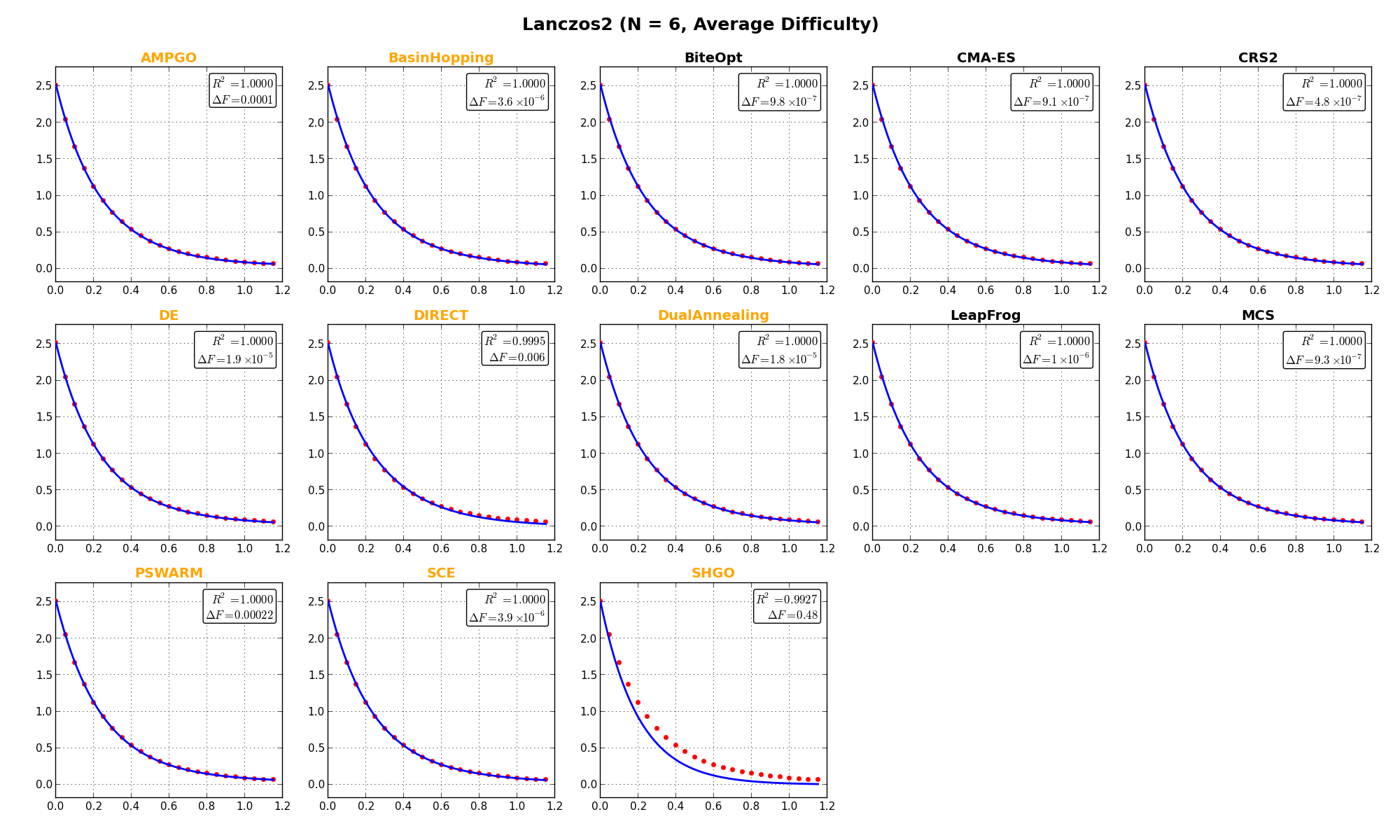
NIST Function Lanczos2 |
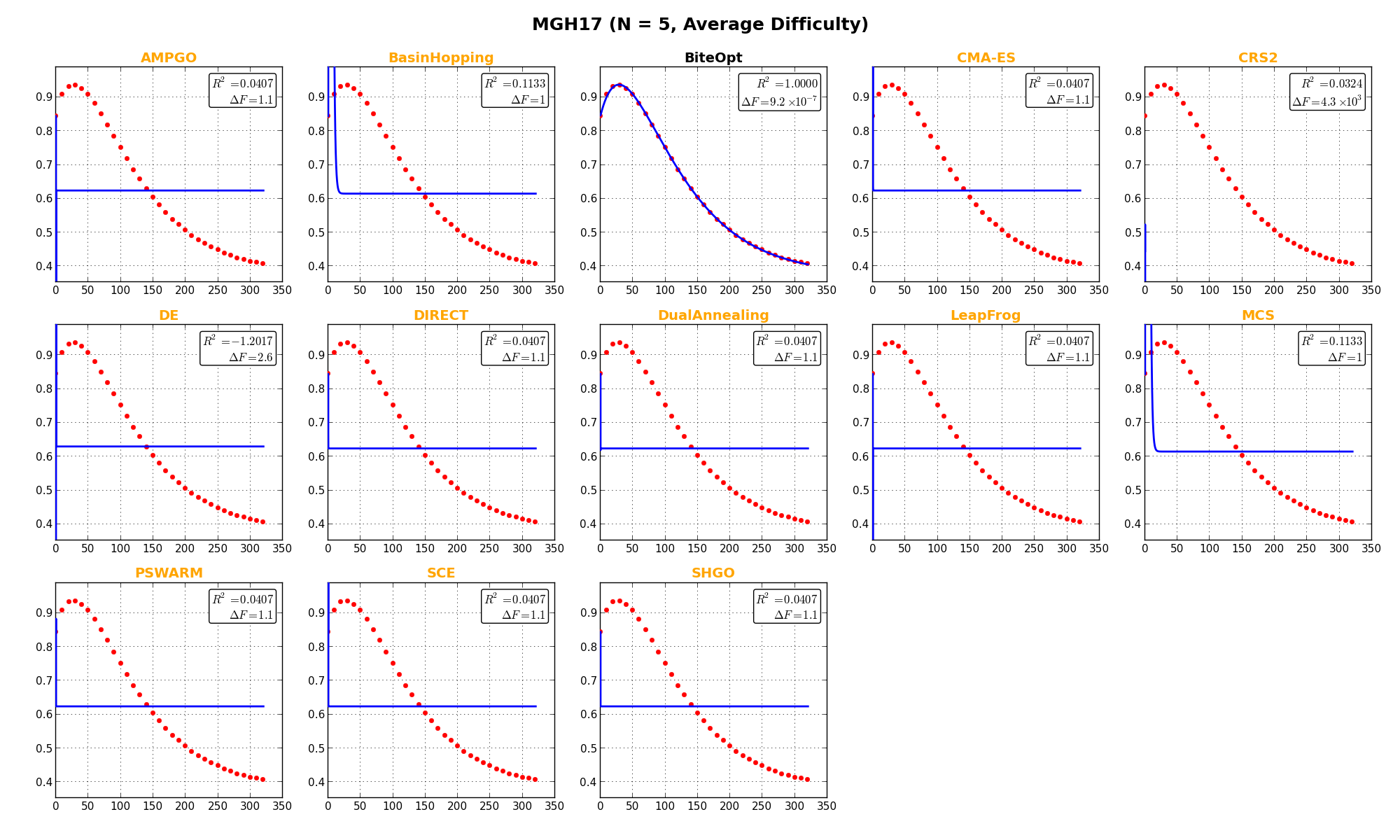
NIST Function MGH17 |
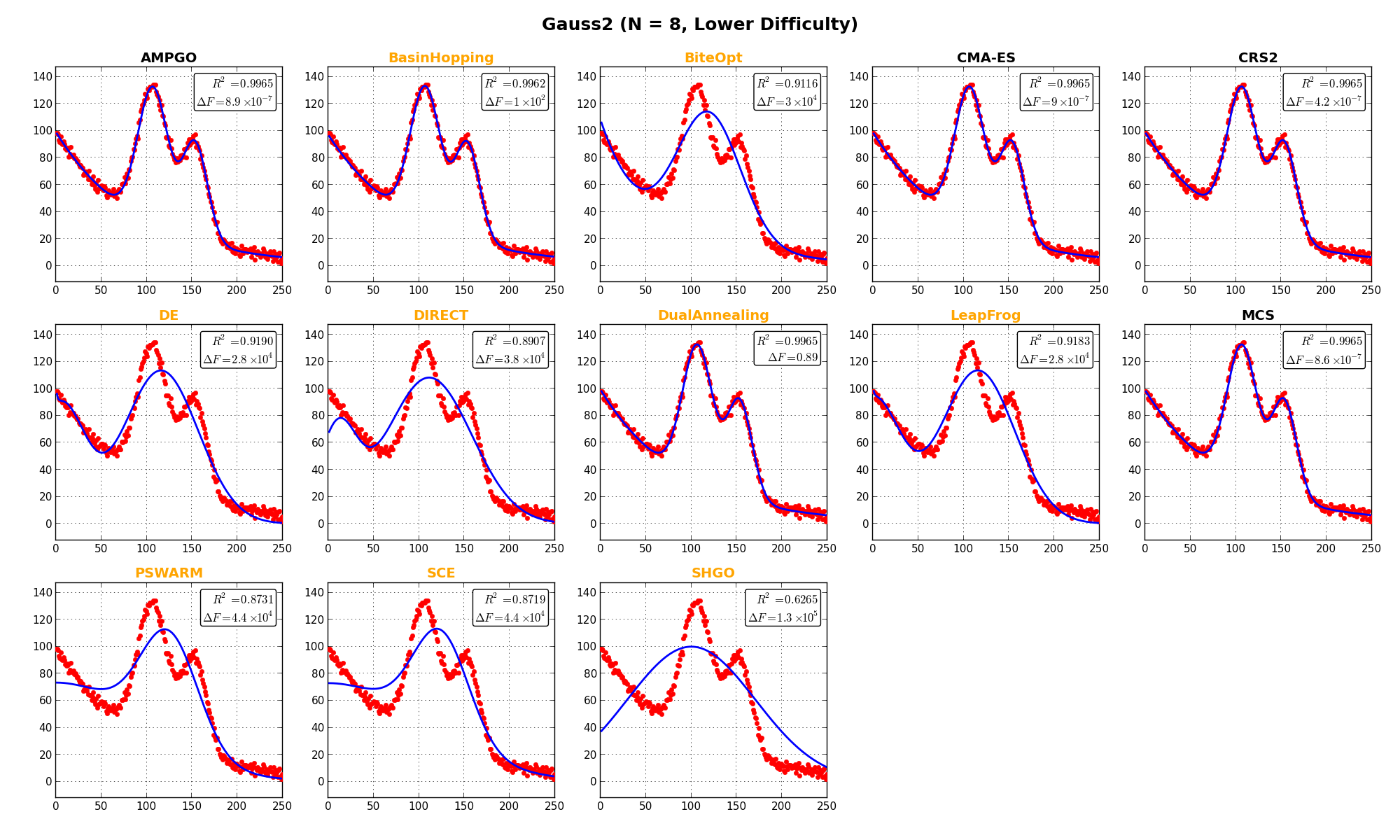
NIST Function Gauss2 |
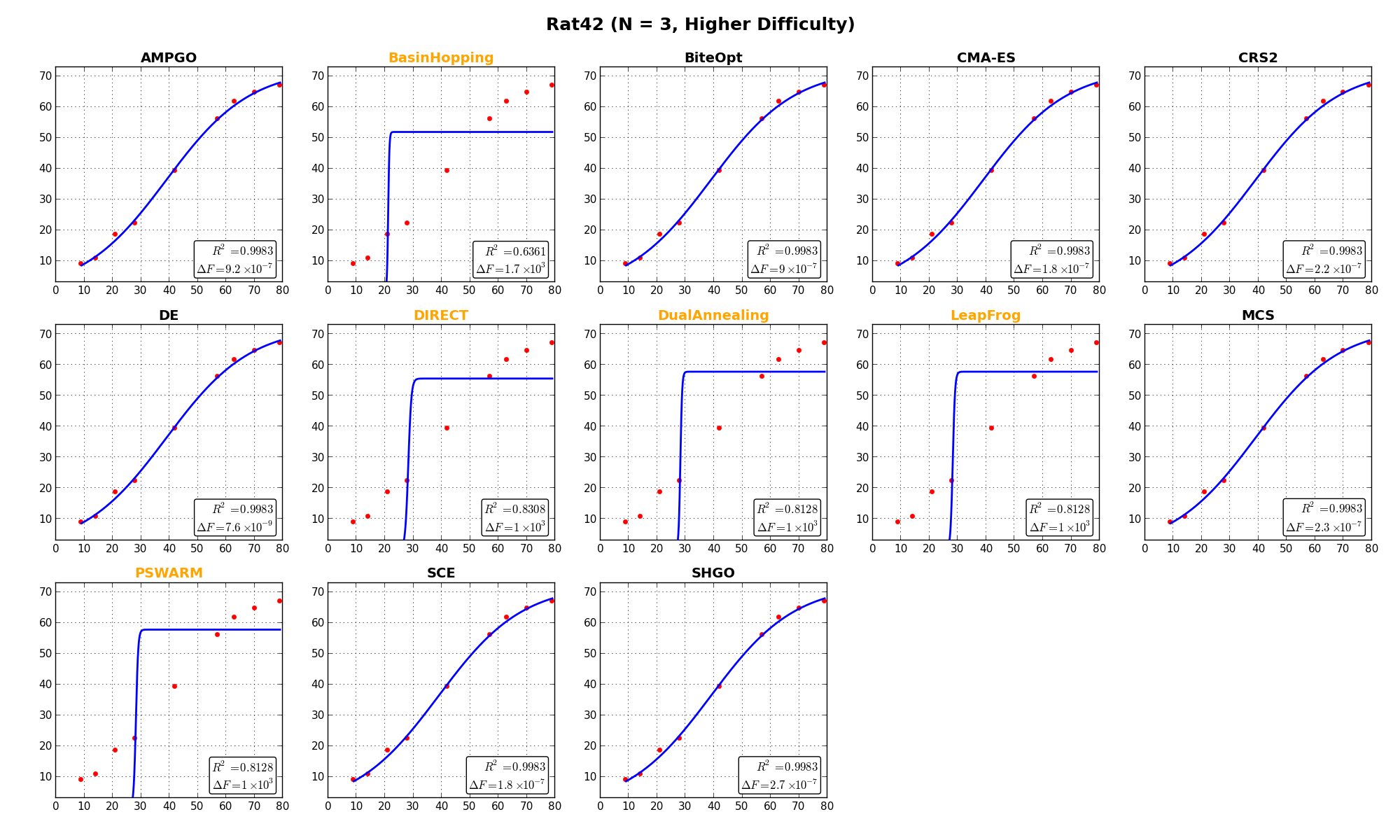
NIST Function Rat42 |
It is also interesting to check whether there are instances of problems that are never solved, no matter the optimization algorithm. This is presented in Table 11.4 below. The table is not sorted by name this time, but in order of actual “difficulty” our solvers encountered in minimizing the NIST objective functions.
| Problem | AMPGO | BasinHopping | BiteOpt | CMA-ES | CRS2 | DE | DIRECT | DualAnnealing | LeapFrog | MCS | PSWARM | SCE | SHGO |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| DanWood | 
|
|
|
|
|
|
|
|
|
|
|
|
|
| Eckerle4 |
|

|
|
|
|
|
|
|
|
|
|
|
|
| BoxBOD |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Chwirut1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Rat42 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Chwirut2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Misra1b |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Misra1c |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Misra1d |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Roszman1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Gauss1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Lanczos2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| ENSO |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Gauss2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Lanczos1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Lanczos3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Gauss3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Kirby2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| MGH09 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Misra1a |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Bennett5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| MGH17 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Nelson |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Rat43 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Thurber |
|
|
|
|
|
|
|
|
|
|
|
|
|
| Hahn1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
| MGH10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
As can be seen, one NIST model was solved by all optimization algorithms (DanWood), while there were at least 2 solvers able to minimize correctly more than 20 functions. It has to be noted, for two of the NIST models no solvers were able to find any suitable set of parameters to satisfy convergence criteria (Hahn1 and MGH10).
 Sensitivities on Functions Evaluations Budget¶
Sensitivities on Functions Evaluations Budget¶It is also interesting to analyze the success of an optimization algorithm based on the fraction (or percentage) of problems solved given a fixed number of allowed function evaluations, let’s say 100, 200, 300,... 2000, 5000, 10000.
In order to do that, we can present the results using two different types of visualizations. The first one is some sort of “small multiples” in which each solver gets an individual subplot showing the improvement in the number of solved problems as a function of the available number of function evaluations - on top of a background set of grey, semi-transparent lines showing all the other solvers performances.
This visual gives an indication of how good/bad is a solver compared to all the others as function of the budget available. Results are shown in Figure 11.4.
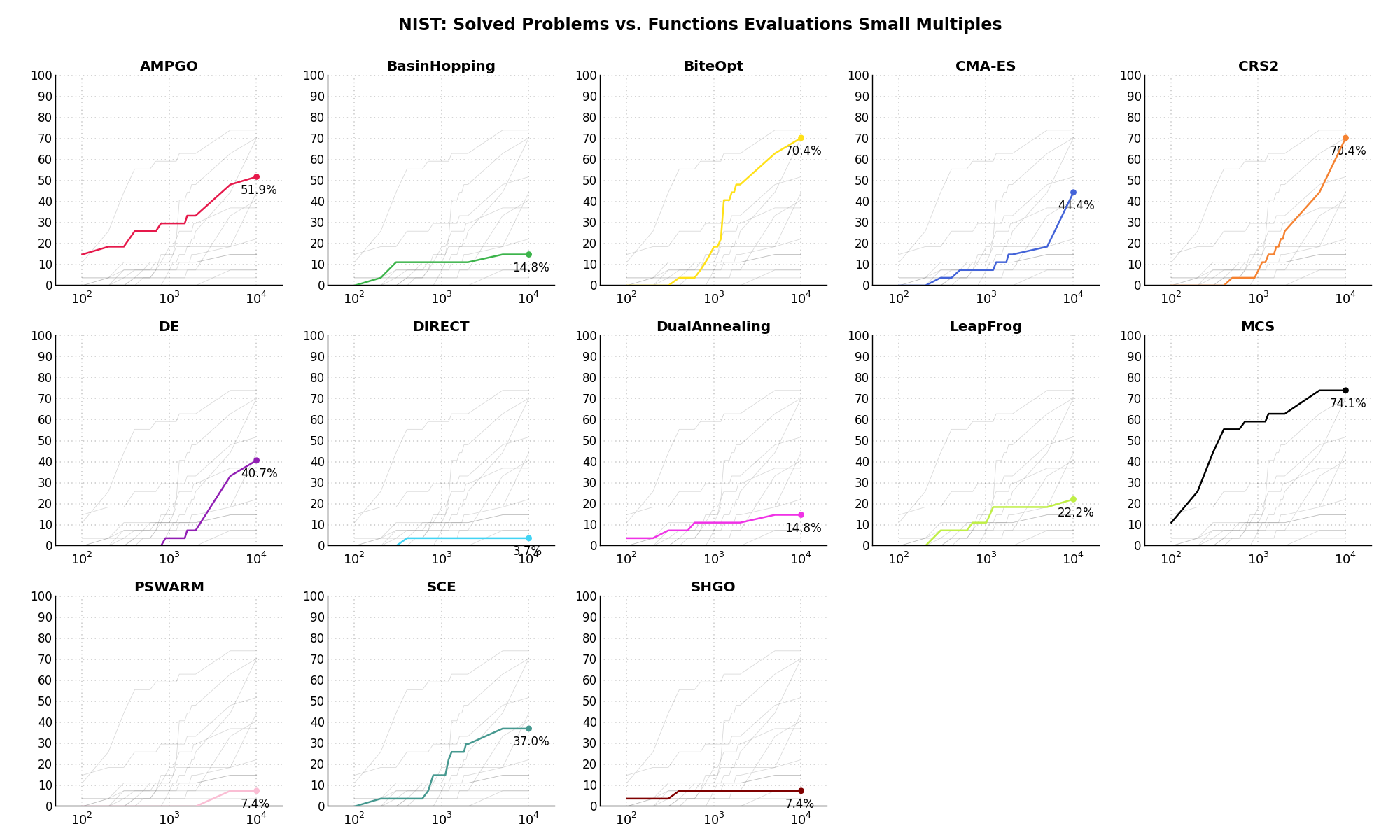
Figure 11.4: Percentage of problems solved given a fixed number of function evaluations on the NIST test suite
The second type of visualization is sometimes referred as “Slopegraph” and there are many variants on the plot layout and appearance that we can implement. The version shown in Figure 11.5 aggregates all the solvers together, so it is easier to spot when a solver overtakes another or the overall performance of an algorithm while the available budget of function evaluations changes.
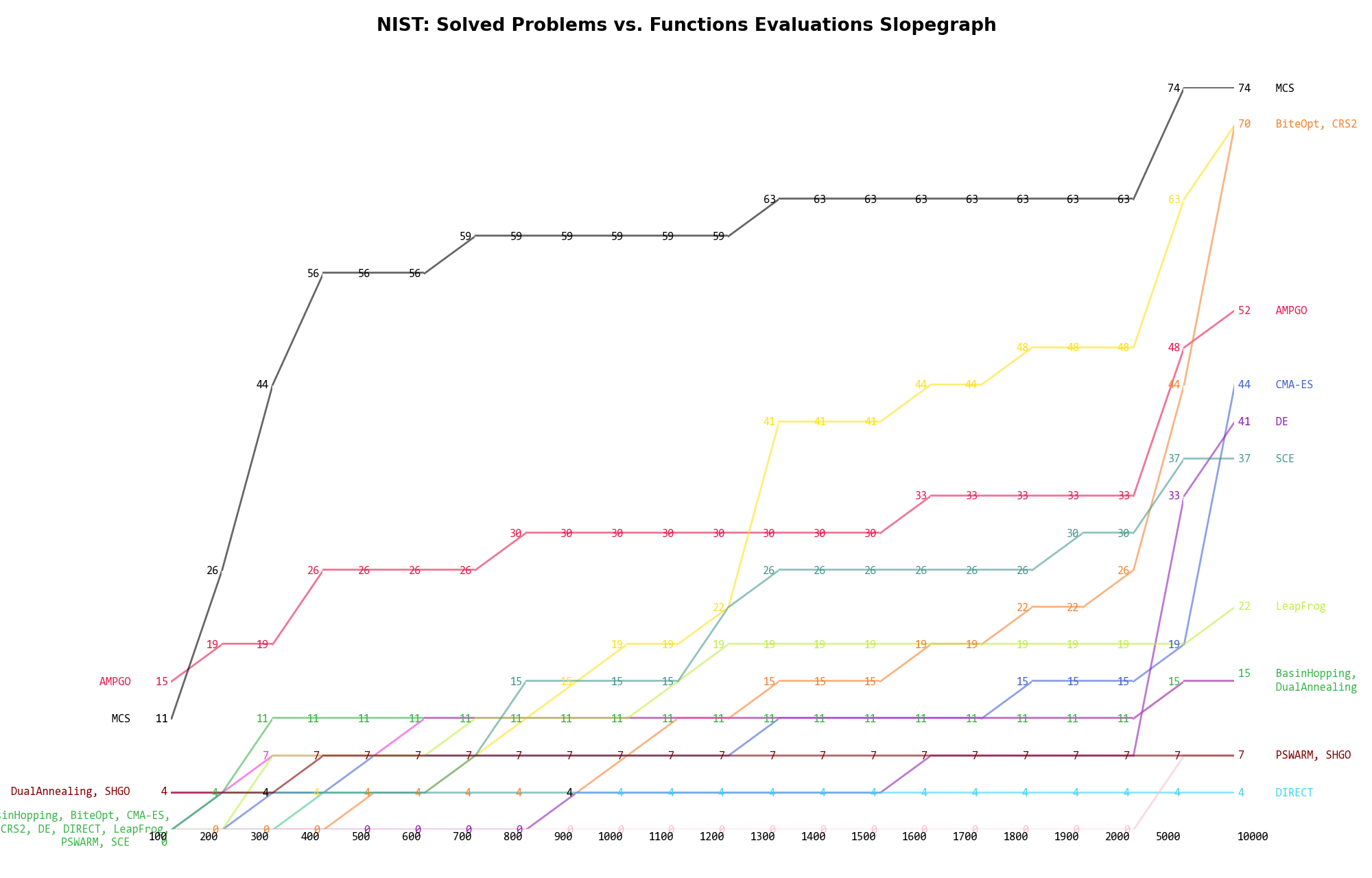
Figure 11.5: Percentage of problems solved given a fixed number of function evaluations on the NIST test suite
A few obvious conclusions we can draw from these pictures are: