Navigation
- index
- next |
- previous |

- Home »
- The Benchmarks »
- GlobalLib
 GlobalLib¶
GlobalLib¶| Fopt Known | Xopt Known | Difficulty |
|---|---|---|
| Yes | Yes | Easy |
Arnold Neumaier maintains a suite of test problems termed “COCONUT Benchmark” and Sahinidis has converted the GlobalLib and PricentonLib AMPL/GAMS dataset into C/Fortran code (http://archimedes.cheme.cmu.edu/?q=dfocomp ). From Sahinidis’ work I have taken the C files - which are not a model of programming as they were automatically translated from GAMS models - and used a simple C parser to convert the benchmarks from C to Python.
The automatic conversion generated a Python module that is 27,400 lines long, and trust me, you don’t want to go through it and look at the objective functions definitions...
The global minima are taken from Sahinidis or from Neumaier or refined using the NEOS server when the accuracy of the reported minima is too low. The suite contains 181 test functions with dimensionality varying between 2 and 9.
 Methodology¶
Methodology¶There isn’t much to describe in terms of methodology, as everything has been automatically translated from C files to Python. Some of the 2D objective functions in this benchmark test suite can be seen in Figure 12.1.
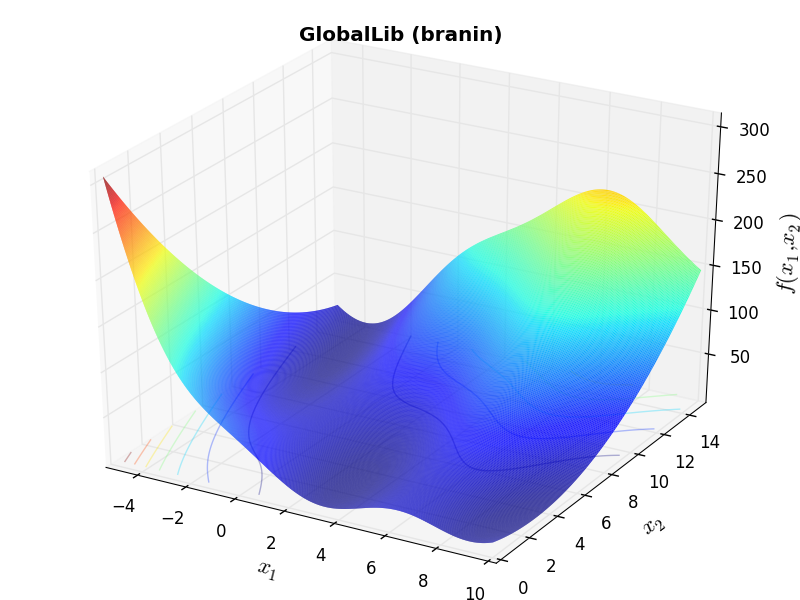
GlobalLib Function Branin |
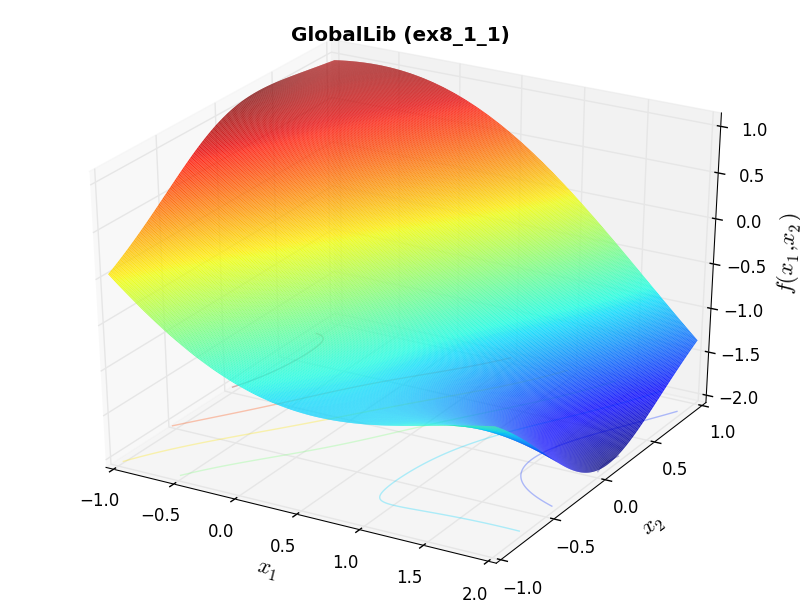
GlobalLib Function ex8_1_1 |
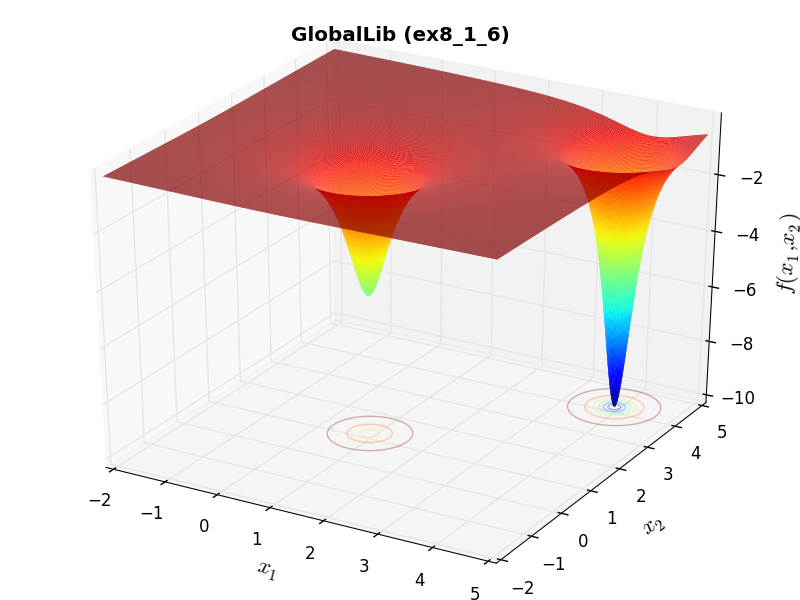
GlobalLib Function ex8_1_6 |
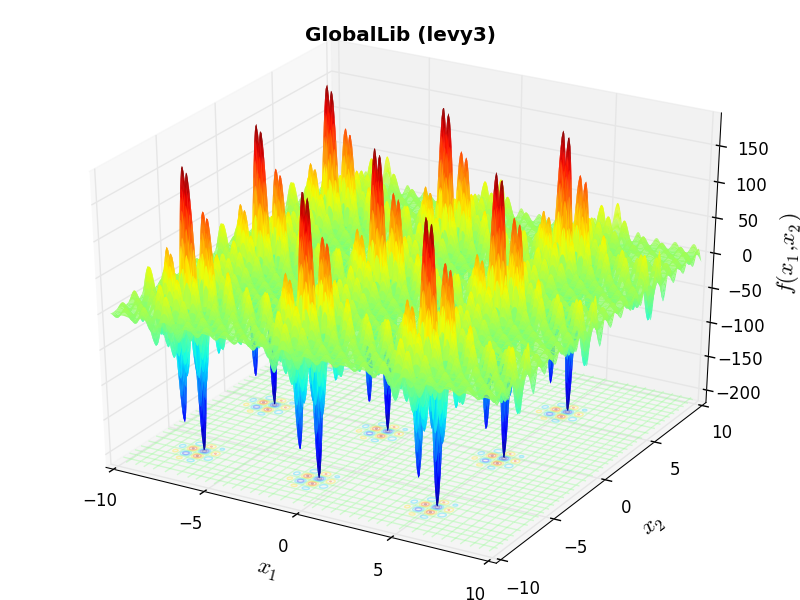
GlobalLib Function levy3 |
GlobalLib Function s214 |
GlobalLib Function zangwil2 |
 General Solvers Performances¶
General Solvers Performances¶Table 12.1 below shows the overall success of all Global Optimization algorithms, considering every benchmark function,
for a maximum allowable budget of  .
.
The GlobalLib benchmark suite is a relatively easy test suite: the best solver for is MCS, with a success
rate of 80.7%, followed at a significant distance by BiteOpt.
Note
The reported number of functions evaluations refers to successful optimizations only.
| Optimization Method | Overall Success (%) | Functions Evaluations |
|---|---|---|
| AMPGO | 60.77% | 204 |
| BasinHopping | 53.04% | 224 |
| BiteOpt | 72.38% | 495 |
| CMA-ES | 43.09% | 707 |
| CRS2 | 43.65% | 754 |
| DE | 39.78% | 935 |
| DIRECT | 45.86% | 445 |
| DualAnnealing | 59.67% | 223 |
| LeapFrog | 49.17% | 439 |
| MCS | 80.66% | 212 |
| PSWARM | 19.34% | 1,211 |
| SCE | 56.35% | 543 |
| SHGO | 60.22% | 181 |
These results are also depicted in Figure 12.2, which shows that MCS is the best solver, followed at a significant distance by BiteOpt.
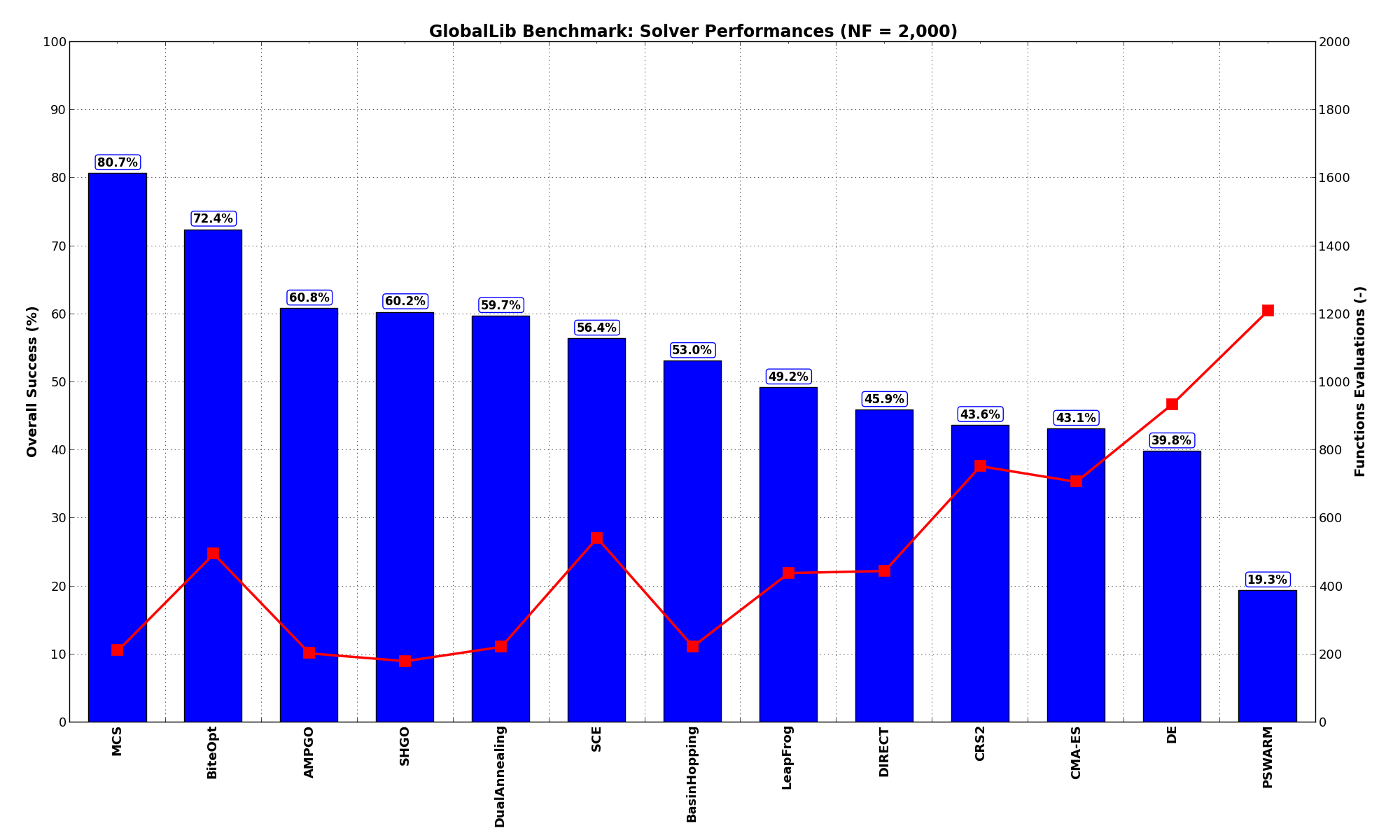
Figure 12.2: Optimization algorithms performances on the GlobalLib test suite at
Pushing the available budget to a very generous  , the results show MCS still keeping the lead,
with BiteOpt much closer now and AMPGO trailing a bit behind. The results are also shown visually in Figure 12.3.
, the results show MCS still keeping the lead,
with BiteOpt much closer now and AMPGO trailing a bit behind. The results are also shown visually in Figure 12.3.
| Optimization Method | Overall Success (%) | Functions Evaluations |
|---|---|---|
| AMPGO | 71.82% | 892 |
| BasinHopping | 53.59% | 260 |
| BiteOpt | 79.01% | 963 |
| CMA-ES | 54.14% | 1,691 |
| CRS2 | 67.40% | 1,786 |
| DE | 65.19% | 2,743 |
| DIRECT | 48.62% | 647 |
| DualAnnealing | 62.98% | 416 |
| LeapFrog | 54.70% | 817 |
| MCS | 85.08% | 518 |
| PSWARM | 44.75% | 2,542 |
| SCE | 66.30% | 1,189 |
| SHGO | 61.88% | 299 |
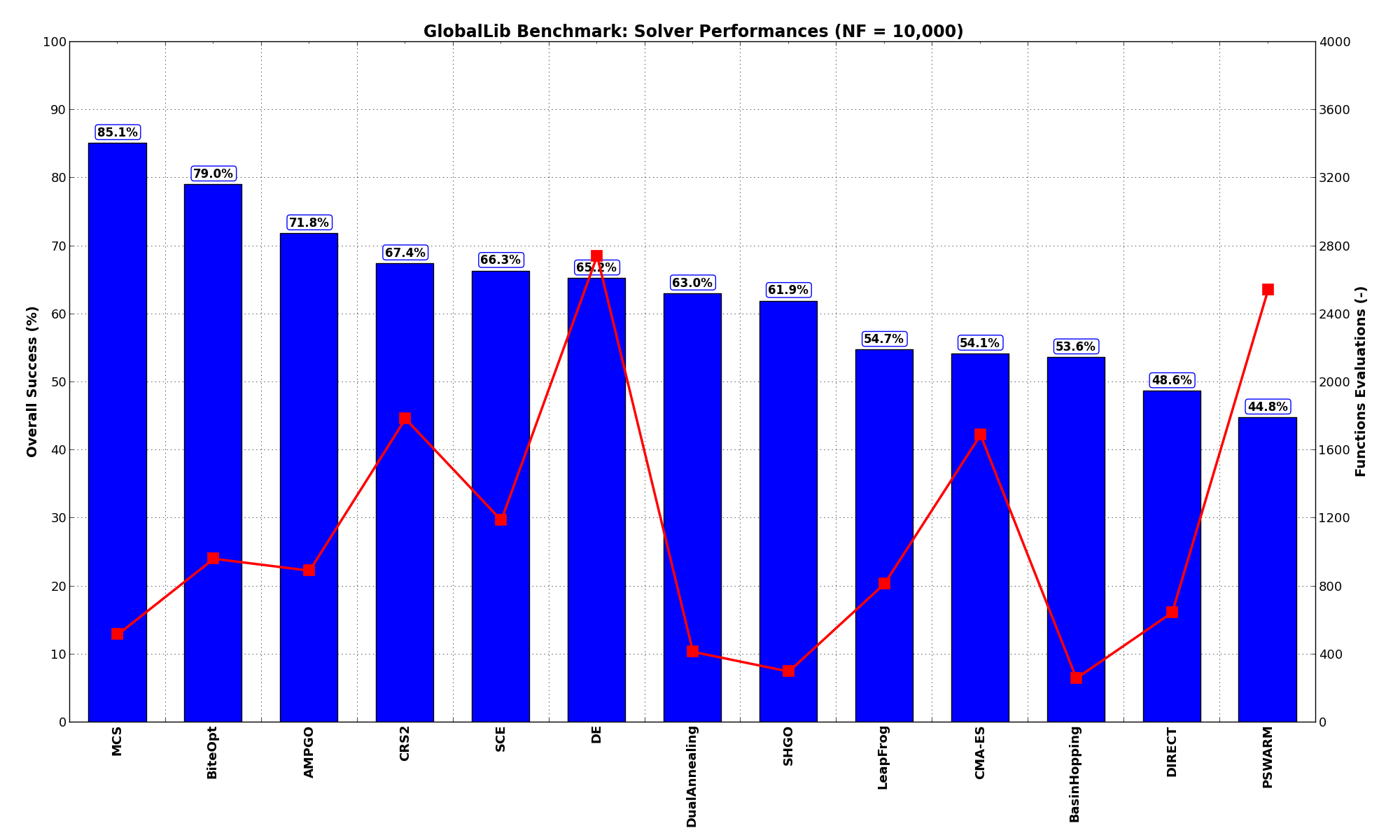
Figure 12.3: Optimization algorithms performances on the GlobalLib test suite at
 Sensitivities on Functions Evaluations Budget¶
Sensitivities on Functions Evaluations Budget¶It is also interesting to analyze the success of an optimization algorithm based on the fraction (or percentage) of problems solved given a fixed number of allowed function evaluations, let’s say 100, 200, 300,... 2000, 5000, 10000.
In order to do that, we can present the results using two different types of visualizations. The first one is some sort of “small multiples” in which each solver gets an individual subplot showing the improvement in the number of solved problems as a function of the available number of function evaluations - on top of a background set of grey, semi-transparent lines showing all the other solvers performances.
This visual gives an indication of how good/bad is a solver compared to all the others as function of the budget available. Results are shown in Figure 12.4.
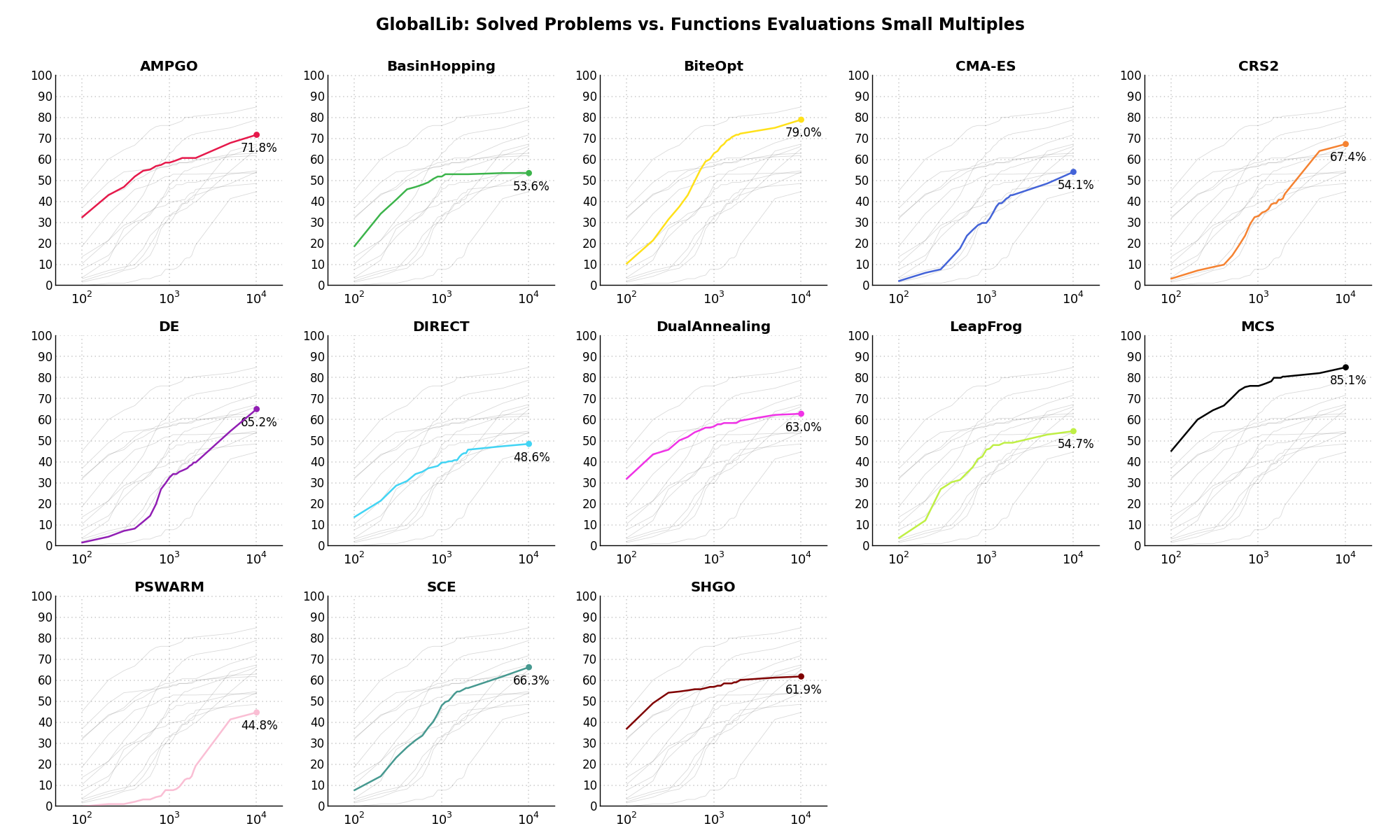
Figure 12.4: Percentage of problems solved given a fixed number of function evaluations on the GlobalLib test suite
The second type of visualization is sometimes referred as “Slopegraph” and there are many variants on the plot layout and appearance that we can implement. The version shown in Figure 12.5 aggregates all the solvers together, so it is easier to spot when a solver overtakes another or the overall performance of an algorithm while the available budget of function evaluations changes.
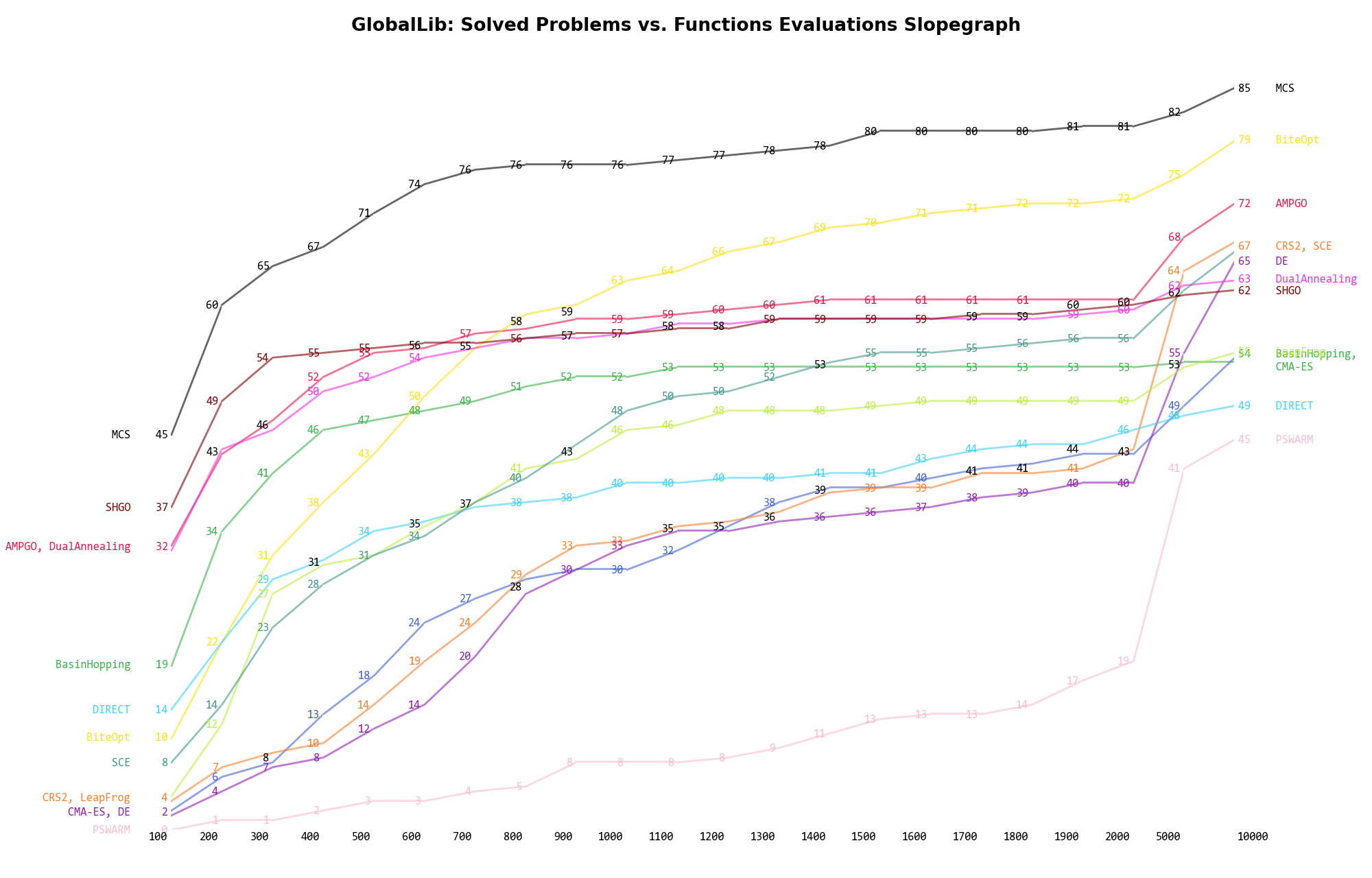
Figure 12.5: Percentage of problems solved given a fixed number of function evaluations on the GlobalLib test suite
A few obvious conclusions we can draw from these pictures are: